
Dual arms
Mission Info
AASP Program
ARES is a Mars exploration and astrobiology program that treats robotic fieldwork less like a sequence of isolated rover traverses and more like a sustained, mobile laboratory campaign. Each ARES Autonomous Science Platform is designed to survey difficult terrain, triage science targets locally, and return the highest-priority samples to a Mars-orbiting relay vehicle.
AASP-13 Rover
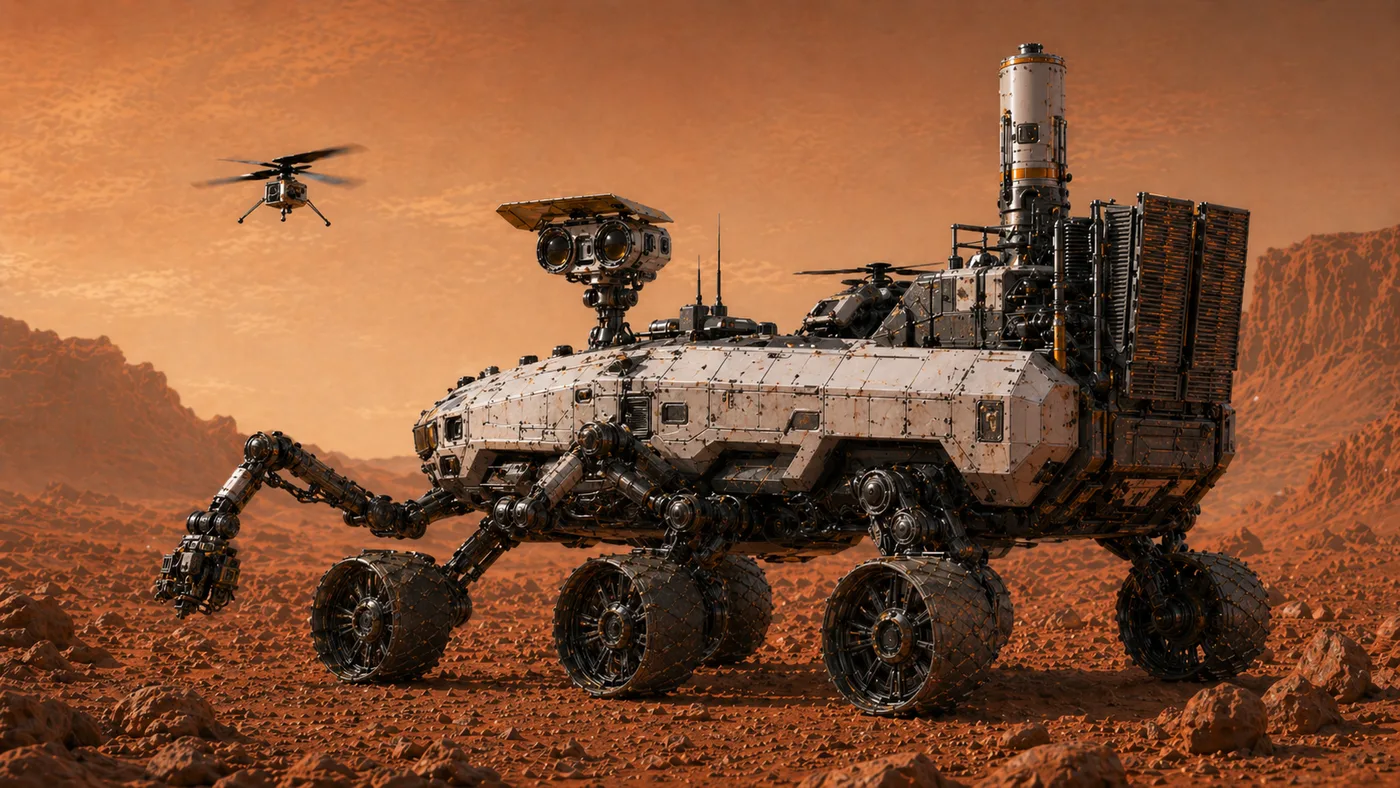
ARES Autonomous Science Platform 13, a.k.a. "Thirteen", is (unsurprisingly) the thirteenth autonomous science platform in the ARES Mars exploration and astrobiology program: Thirteen is a large nuclear-powered Mars field laboratory, with six independently driven wheels, two front robotic arms, a binocular camera mast with retractable optical shielding, two semi-autonomous Kestrel scout helicopters, and a launch tube for small sample-return rockets at the rear of the upper deck..
The paltform is intentionally bigger than the various single-rover missions that came before it. Its job is to act as a semi-permanent, largely autonomous field station that can move with the science, instead of rationing every watt and every command cycle. It is not fast. It is not subtle. It is also not a tank, no matter how many times Systems asks Public Affairs to stop using the word "chonky."
Editor's Note
The official paperwork calls the mast visor the Mastcam Solar Attenuation and Dust Calibration Visor Assembly. The flight team calls them sunglasses. Both names are technically accurate.
Mission Overview
Vehicle Architecture
Thirteen uses a large six-wheel rocker-bogie-derived chassis arranged as three wheel stations per side. Each wheel is independently driven. The front and rear wheels steer, while the middle wheels provide load-bearing traction and terrain compensation.
The main body is divided into practical spacecraft neighborhoods:
- Forward bay: dual robotic arms, hazard cameras, close-range navigation sensors, and arm-interface avionics.
- Central vault: warm electronics box, science instruments, sealed microscopy and chemistry chamber, sample carousel, and storage.
- Top deck: two Kestrel scout-helicopter roost bays, mast base, high-gain antenna, calibration targets, and witness plates.
- Aft bay: compact fission surface power unit, thermal control hardware, radiator hinges, and micro-ascent rocket cassette.
- Rear/top launch tube: for launching Mars Sample Launch Vehicles (MSLVs)
Power System
AASP-13 uses a compact fission surface power unit mounted low and aft-central inside an armored thermal bay. Heat pipes carry waste heat to deployable side and rear radiators, while a closed Stirling thermal engine loop feeds continuous electrical power into the rover bus.
Battery banks handle peak loads: drilling, sample processing, helicopter charging, launch preparation, high-power mobility bursts, and cold-start recovery after dust events. The reactor gives Thirteen something older RTG rovers never had in abundance: a steady power budget and enough thermal margin to behave like a semi-permanent field lab.
There is no green glow. There is shielding, heat plumbing, radiator discipline, and the kind of engineering that makes thermal-control people look quietly smug.
Mobility
The six-wheel system keeps Thirteen within a proven Mars rover mobility lineage while scaling the structure for a much heavier field laboratory. Active suspension can level the chassis for drilling, delicate arm work, sample handling, and micro-MAV launch operations.
Before high-force drilling or sample launch, Thirteen deploys stabilizer pads to brace the chassis against regolith. The wheel design follows the Mars rover lineage: metal structure, grousered rims, compliant spokes, and a willingness to complain acoustically about every rock.
Robotic Systems
The left arm is the clean precision arm. Its turret carries a macro imager, microscope, Raman and fluorescence spectroscopy package, XRF/APXS-style contact sensor, dust brush, abrasion pad, witness-plate handler, and contamination-control tools.
The right arm is the dirty/high-force arm. Its turret carries a percussive coring drill, shallow auger, trenching scoop, rock abrader, sample-tube loader, pry tool, and regolith scraper.
The split keeps delicate astrobiology work away from the hardware that spends its day doing geology crimes.
Air Wing
Thirteen carries two reusable Kestrel scout helicopters, similar in concept to the Ingenuity helicopter from the Curiosity program, but significantly larger and operationally integrated with the main AASP platform. Weighing approximately 6kg, with coaxial counter-rotating foldable rotors around 1.6-1.8 m in diameter. AASP-13 is equipped with two "roost" bays/pads for these helicopters, featuring charge contacts and thermal coupling pads, on the upper deck.
The Kestrels scout routes, map hazards, inspect ridges and valleys, verify sample caches, monitor weather and dust, and survey terrain the rover should not try to drive across. They are scouts, not cargo aircraft. Mars does not have enough atmosphere for bravado.
Sample Processing And Return
Samples move from the tool arm through a sealed transfer port into Thirteen's internal carousel. The lab performs preliminary inspection, screens for contamination risk, and ranks priority samples. High-value material is sealed into tiny return capsules and loaded into micro-ascent rockets.
Each micro-MAV is a small two-stage solid rocket: about 1.5m long, 20-30 cm in diameter (variable along length), and approximately 90 kg. It is cold-ejected clear of the rover before ignition, then climbs to rendezvous with a Mars-orbiting return vehicle. The orbiter handles capture and Earth return injection.
The platform is typically equipped with 3-4 of these rockets depending on other science payloads, so return capacity is extremely limited.
Launch sequence is deliberately boring until it is not: level chassis, deploy stabilizer pads, lock radiator and drone bay covers, shutter nearby optics, open rear/top tube, eject, ignite, track, breathe again.
Mast And Visor
The binocular mast carries stereo zoom science cameras, navigation cameras, panoramic imaging, lidar/rangefinding, meteorology sensors, dust monitoring, sun sensing, and high-mounted navigation aids.
It also carries the Mastcam Solar Attenuation and Dust Calibration Visor Assembly.
They are not sunglasses. They are absolutely sunglasses.
The visor drops two smoked dark-gold protective filter panels over the binocular mast cameras for solar imaging attenuation, dust protection, glare reduction, optical calibration, emergency lens shielding, and rover selfies. It is a critical part of the rover's safety system.
It is also, unfortunately for Public Affairs, iconic.
Autonomous Operations
Thirteen has to coordinate rover mobility, two helicopters, two robotic arms, contamination control, power planning, thermal management, sample triage, and launch readiness while Earth is several light-minutes away.
The local autonomy stack handles terrain classification, route planning, drone scheduling, sample-target ranking, hazard avoidance, power budgeting, and dryly sarcastic local mission notes.
Typical loop: Kestrels scout the region, Thirteen builds a terrain map, the rover drives to a safe standoff, the science arm inspects, the tool arm samples, the lab screens material, and the best samples leave Mars in very small rockets.
Specifications
| Field | Value |
|---|---|
| Official name | ARES Autonomous Science Platform 13 |
| Callsign | Thirteen |
| Mission type | Autonomous astrobiology and sample-return platform |
| Length | 4.8-5.2 m |
| Width | 3.2-3.6 m |
| Deck height | 2.2-2.5 m |
| Mast height | 3.8-4.2 m raised |
| Mass | 2.5-3.5 tonnes depending on payload |
| Wheels | 6 independently driven wheels |
| Suspension | Articulated rocker-bogie derivative with active leveling |
| Power | Compact fission reactor plus battery buffer |
| Continuous power | 8-12 kWe typical, reduces over time |
| Peak buffered power | 30-50 kW short-duration |
| Aerial scouts | 2 reusable Kestrel helicopters |
| Arms | 2 turreted robotic arms |
| Sample return | 2-4 micro-ascent rockets to orbital return vehicle |
| Camera mast | Binocular stereo mast with deployable visor |
| Unofficial feature | Sunglasses |
Rover Log Extracts
designation: AASP-13
callsign: Thirteen
program: ARES
reactor: warm and judgmental
wheels: six
drones: two
sunglasses: mission-criticalvisor deployed
glare reduced
dust protection nominal
looking sick as hellsample target acquired
rock selected
drill enthusiasm: high
geology crimes: pendingscout flight complete
dune field mapped
route confidence: acceptable
drone 2 remains concerningly bold